Online Context Learning for Socially-compliant Navigation
Iaroslav Okunevich, Alexandre Lombard, Tomas Krajnik, Yassine Ruichek, Zhi Yan·June 17, 2024
Summary
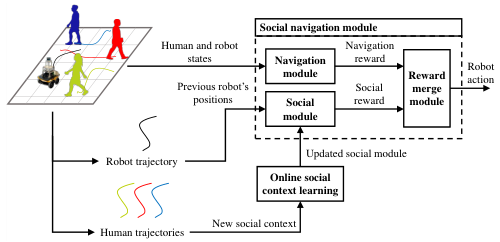
The paper presents an online context learning method for socially-compliant robot navigation, combining deep reinforcement learning (DRL) and online robot learning (ORL). The approach addresses the challenge of adapting to diverse human factors and environments by using a two-layer structure: a DRL layer for basic navigation and an upper layer that updates a social module with real-time human trajectory data. This method improves social efficiency and navigation robustness, outperforming state-of-the-art techniques by 8% in complex scenarios. Key contributions include a Markov decision process formulation, a value-based SARL framework, and a social neural network with online adaptation. Experiments with simulated and real robots demonstrate the method's effectiveness in maintaining social distance, adaptability, and improved safety. Future work will focus on long-term real-world evaluations and expanding the system's robustness in various public spaces.

Introduction
Background
Evolution of socially-aware robot navigation
Challenges in adapting to human factors and environments
Objective
To develop a method that combines DRL and ORL for real-time adaptation
Improve social efficiency and navigation robustness
Outperform state-of-the-art techniques by 8% in complex scenarios
Method
Deep Reinforcement Learning (DRL) Layer
Markov Decision Process (MDP) Formulation
Definition of states, actions, and rewards
Exploration-exploitation trade-off
Value-Based Reinforcement Learning
Q-learning or SARSA for navigation decisions
Online Robot Learning (ORL) Layer
Social Module Update
Real-time data collection of human trajectories
Incorporation into the social neural network
Social Neural Network
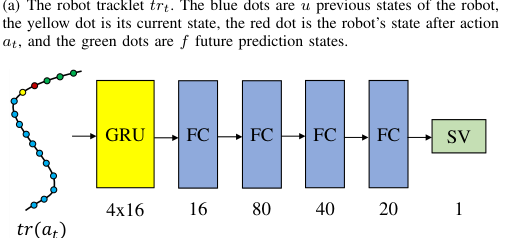
Architecture and design for social context understanding
Online adaptation mechanism
Performance Evaluation
Experimental Setup
Simulated and real robot platforms
Metrics: social distance, adaptability, safety
Results and Comparison
State-of-the-art technique comparison (8% improvement)
Complex scenario analysis
Future Work
Long-Term Real-World Evaluations
Deployment in diverse public spaces
Data collection and performance analysis
System Robustness Expansion
Addressing new challenges and scenarios
Continuous improvement and adaptation
Conclusion
Summary of key contributions
Implications for socially-compliant robotics
Potential applications and future research directions
Basic info
papers
robotics
artificial intelligence
Advanced features
Insights
How does the two-layer structure in the approach address the challenge of adapting to diverse human factors and environments?
What method does the paper propose for socially-compliant robot navigation?
What are the key contributions of the paper, as mentioned in the text?
By how much does the presented method outperform state-of-the-art techniques in complex scenarios?