OKAMI: Teaching Humanoid Robots Manipulation Skills through Single Video Imitation
Jinhan Li, Yifeng Zhu, Yuqi Xie, Zhenyu Jiang, Mingyo Seo, Georgios Pavlakos, Yuke Zhu·October 15, 2024
Summary
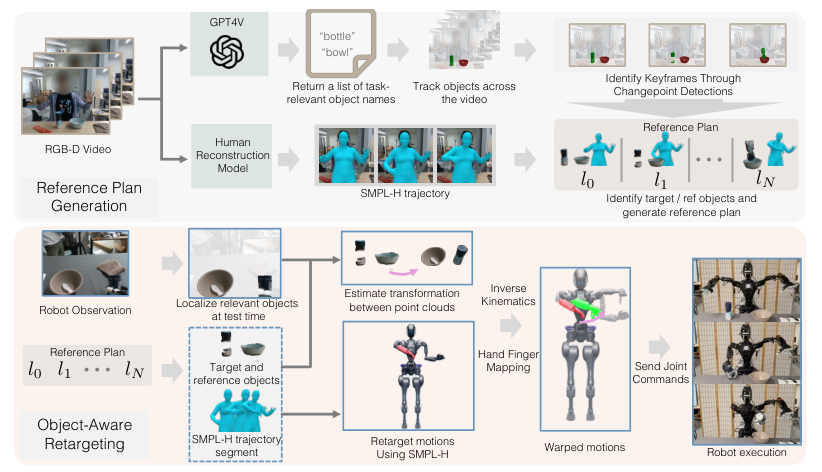
OKAMI is a method enabling humanoid robots to learn manipulation skills from single RGB-D video demonstrations. It uses an open-world vision pipeline to identify task-relevant objects and separately retargets body motions and hand poses, achieving strong generalizations across varying conditions. OKAMI's rollout trajectories are leveraged to train closed-loop visuomotor policies, achieving an average success rate of 79.2% without labor-intensive teleoperation.




Introduction
Background
Overview of humanoid robots and their challenges in learning manipulation skills
Importance of visual learning methods in robotics
Objective
To present OKAMI, a method that enables humanoid robots to learn manipulation skills from single RGB-D video demonstrations, focusing on its unique approach and achievements
Method
Data Collection
Description of the RGB-D video dataset used for demonstrations
Techniques for capturing diverse and challenging manipulation scenarios
Data Preprocessing
Methods for filtering and preparing the collected data for OKAMI's learning process
Handling of object identification and segmentation in the video data
OKAMI Pipeline
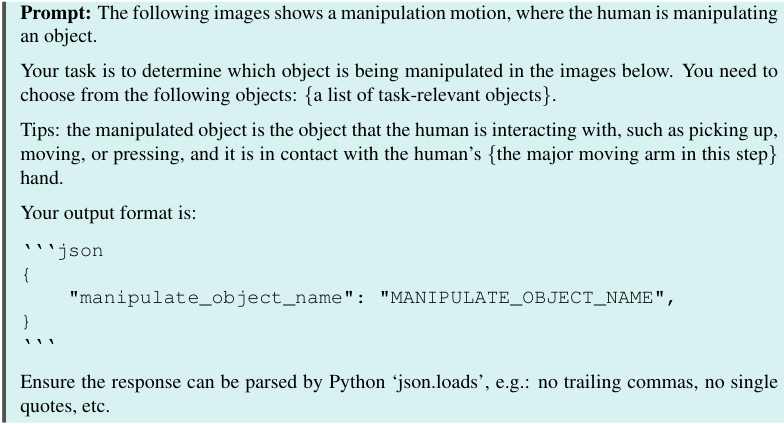
Task-Object Identification
Explanation of the open-world vision pipeline for recognizing task-relevant objects
Algorithms and techniques for object detection and tracking in dynamic scenes
Motion and Pose Retargeting
Description of how body motions and hand poses are separately retargeted from the demonstrations
Discussion on the adaptation of motions and poses to different objects and environments
Trajectory Rollout and Policy Training
Explanation of how rollout trajectories are generated from the demonstrations
Training of closed-loop visuomotor policies using the generated trajectories
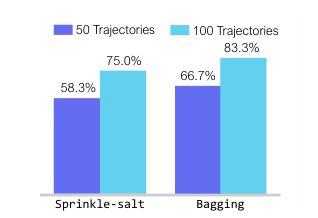
Evaluation metrics and results, including the average success rate of 79.2%
Results and Applications
Performance Analysis
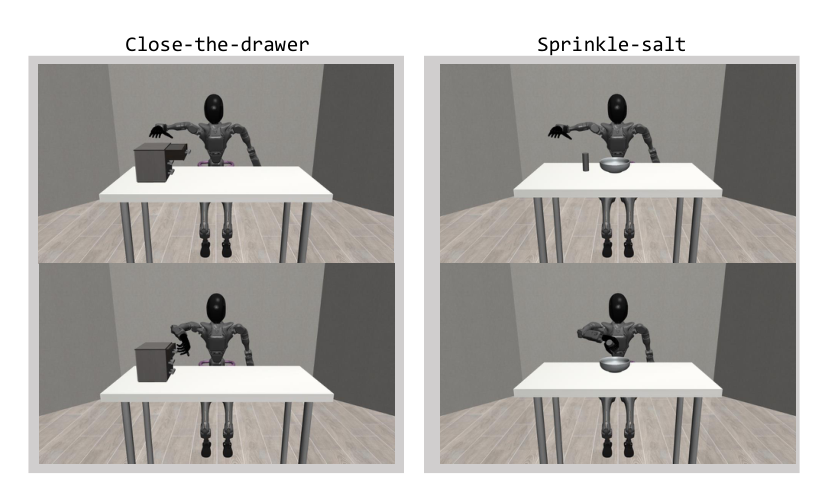
Detailed analysis of OKAMI's performance across various conditions and tasks
Comparison with existing methods in terms of generalization and efficiency
Case Studies
Presentation of specific examples where OKAMI was successfully applied
Discussion on the challenges overcome and the improvements achieved
Future Directions
Exploration of potential enhancements to the OKAMI method
Discussion on its applicability to more complex and varied manipulation tasks
Conclusion
Summary of OKAMI's contributions
Implications for the field of robotics and AI
Call for further research and development
Basic info
papers
computer vision and pattern recognition
robotics
machine learning
artificial intelligence
Advanced features