Incremental Learning of Retrievable Skills For Efficient Continual Task Adaptation
Daehee Lee, Minjong Yoo, Woo Kyung Kim, Wonje Choi, Honguk Woo·October 30, 2024
Summary
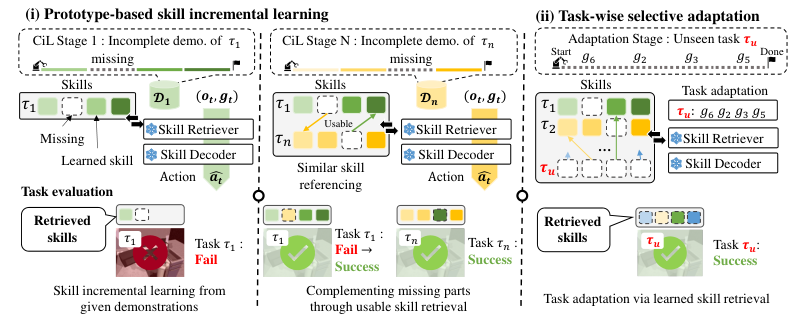
IsCiL, an adapter-based Continual Imitation Learning framework, addresses knowledge sharing limitations in non-stationary environments. It incrementally learns shareable skills from various demonstrations, enabling efficient task adaptation. Demonstrations are mapped into state embedding space, allowing retrieval of skills through prototype-based memory. This approach demonstrates robust performance in complex tasks, showing promise for lifelong agents in dynamic environments.










Introduction
Background
Overview of Continual Imitation Learning (CIoL) and its challenges in non-stationary environments
Explanation of the limitations of existing CIoL frameworks in knowledge sharing
Objective
Aim of IsCiL in addressing knowledge sharing limitations and enabling efficient task adaptation
Method
Data Collection
Techniques for gathering diverse demonstrations for skill learning
Data Preprocessing
Methods for transforming raw demonstrations into state embeddings
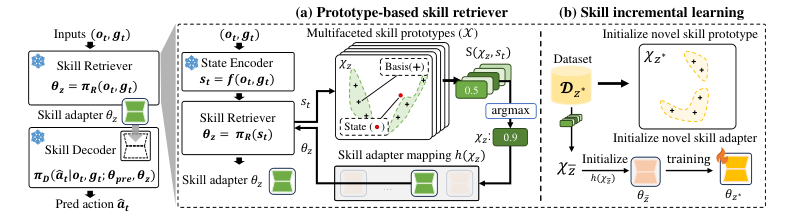
Skill Representation and Retrieval
Prototype-based memory for storing and retrieving skills
Mapping of demonstrations into state embedding space for skill identification
Incremental Learning and Skill Adaptation
Skill Acquisition
Process of learning shareable skills from demonstrations
Skill Sharing
Mechanisms for sharing skills among tasks and agents
Task Adaptation
Strategies for adapting learned skills to new or changed tasks
Performance Evaluation
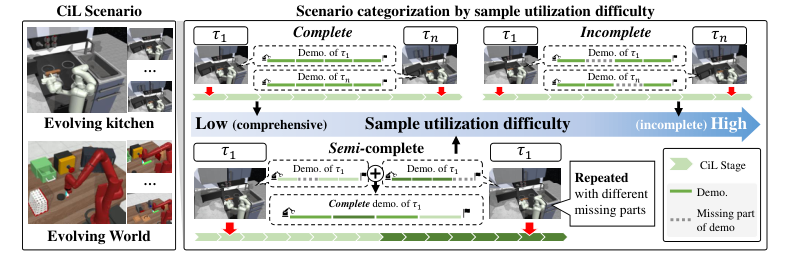
Complex Task Scenarios
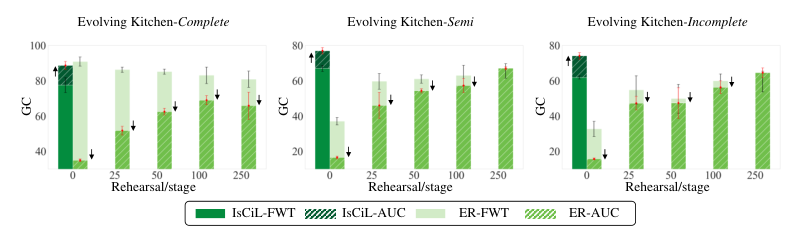
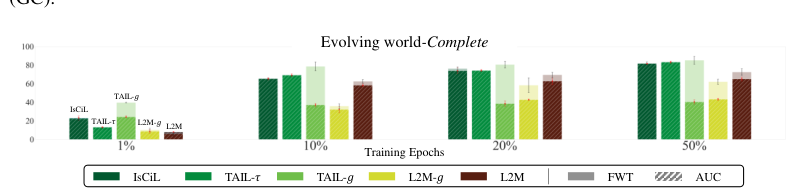
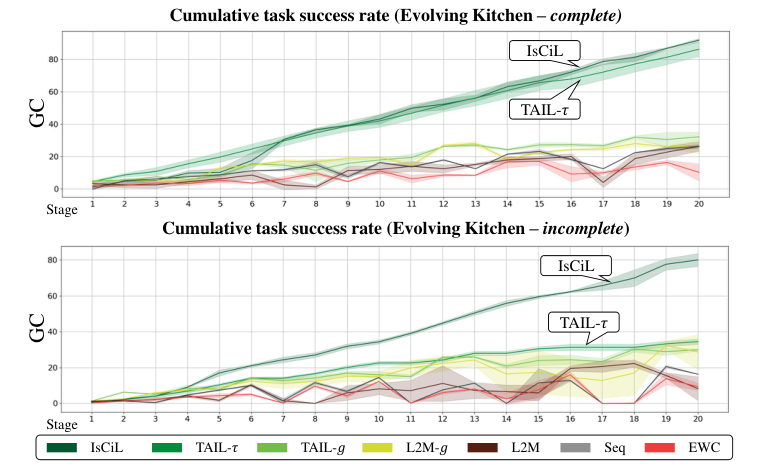
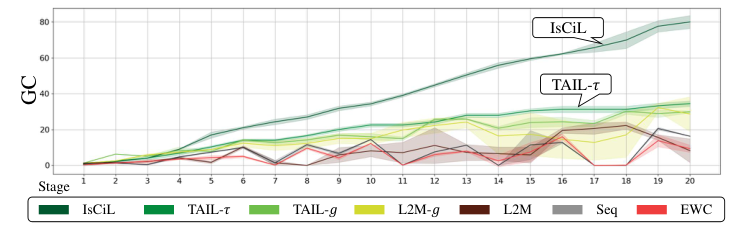
Demonstration of IsCiL's performance in complex, non-stationary environments
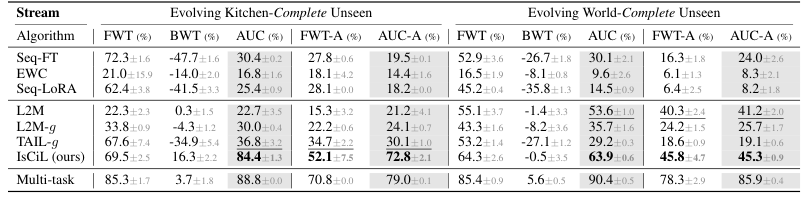
Comparison with Baselines
Metrics for evaluating IsCiL against existing CIoL frameworks
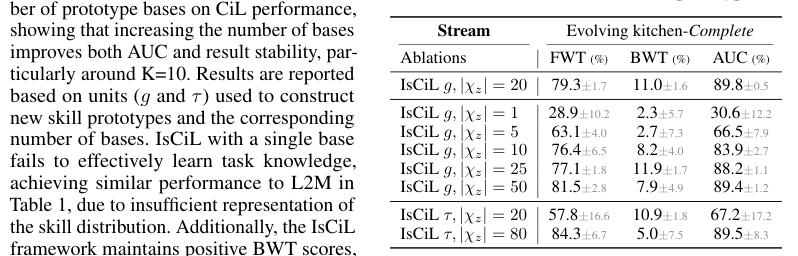
Robustness Analysis
Assessment of IsCiL's ability to maintain performance under varying conditions
Conclusion
Future Directions
Potential enhancements and extensions of IsCiL for lifelong learning agents
Impact on Continual Learning
Discussion on the broader implications for continual learning in dynamic environments
Basic info
papers
machine learning
artificial intelligence
Advanced features
Insights
What is the main focus of IsCiL, the Continual Imitation Learning framework?
How does IsCiL address the limitations of knowledge sharing in non-stationary environments?
What are the demonstrated outcomes of using IsCiL in complex tasks and dynamic environments?
What mechanism does IsCiL use to map demonstrations into state embedding space?