DriveGPT: Scaling Autoregressive Behavior Models for Driving
Xin Huang, Eric M. Wolff, Paul Vernaza, Tung Phan-Minh, Hongge Chen, David S. Hayden, Mark Edmonds, Brian Pierce, Xinxin Chen, Pratik Elias Jacob, Xiaobai Chen, Chingiz Tairbekov, Pratik Agarwal, Tianshi Gao, Yuning Chai, Siddhartha Srinivasa·December 19, 2024
Summary
DriveGPT, a large-scale transformer model for autonomous driving, significantly outperforms existing models by being 3x larger and trained on 50x more data. It demonstrates improved safety and robustness, especially in rare scenarios. Key contributions include scaling laws for model parameters, data size, and compute, validated through experiments showing better scalability of autoregressive decoders. DriveGPT's generalizability is demonstrated on the Waymo Open Motion Dataset, surpassing state-of-the-art motion prediction performance.
Introduction
Background
Overview of autonomous driving technology
Importance of advanced models in enhancing safety and efficiency
Objective
To introduce DriveGPT, a novel large-scale transformer model designed for autonomous driving tasks
Highlight its superior performance compared to existing models
Key Contributions
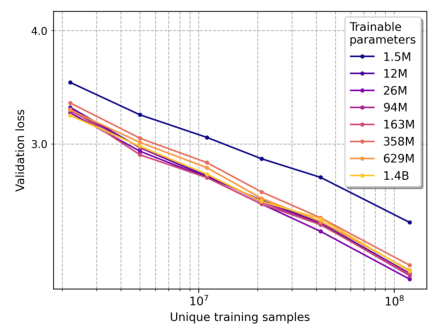
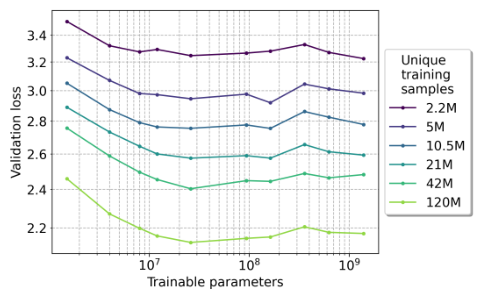
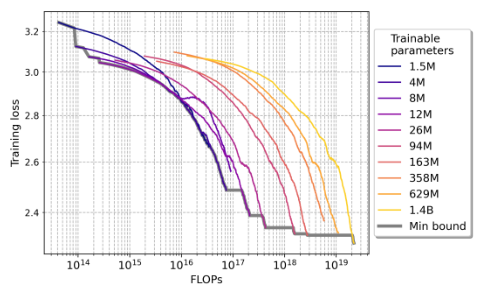
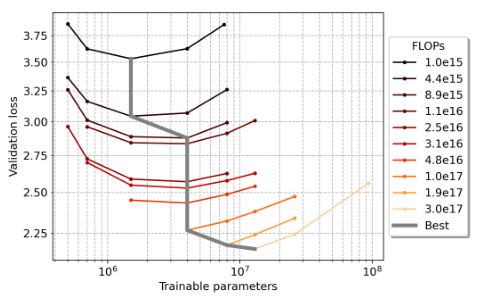
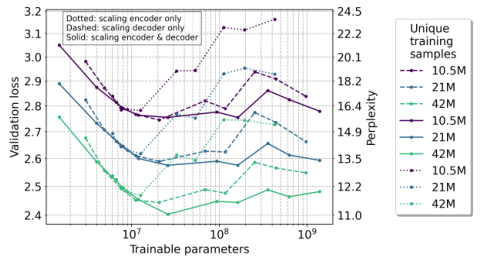
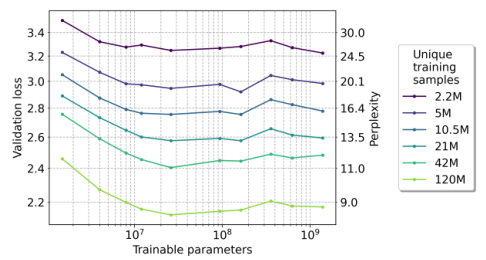
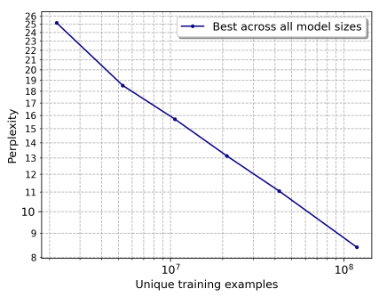
Model Scaling Laws
Explanation of the model's parameter, data size, and compute scaling laws
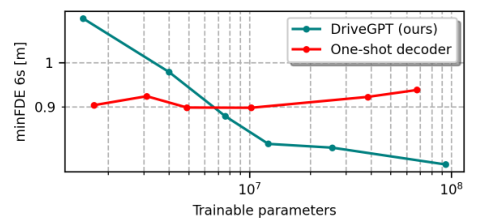
Validation through experiments demonstrating better scalability of autoregressive decoders
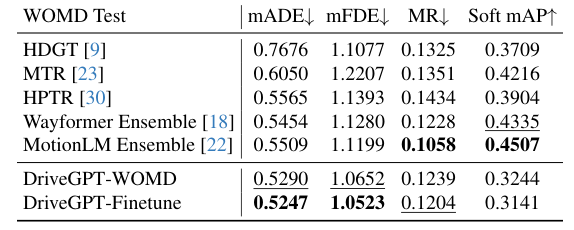
Generalizability
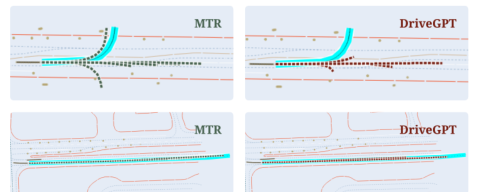
Demonstration of DriveGPT's ability to generalize across various driving scenarios
Performance on the Waymo Open Motion Dataset, showcasing state-of-the-art motion prediction capabilities
Model Architecture
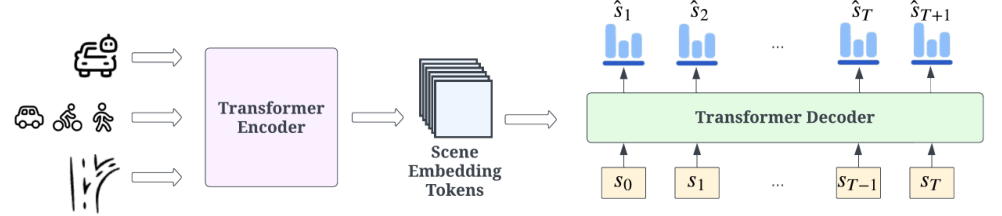
Transformer Architecture
Detailed description of the transformer model used in DriveGPT
Key components and their functions
Autoregressive Decoders
Explanation of autoregressive decoders and their role in DriveGPT
How they contribute to improved prediction accuracy and safety
Training and Data
Data Size
Description of the large-scale dataset used for training DriveGPT
Importance of the increased data size in achieving superior performance
Training Process
Overview of the training methodology for DriveGPT
Techniques for handling large-scale data and model optimization
Experiments and Validation
Performance Metrics
Explanation of the metrics used to evaluate DriveGPT's performance
Comparison with state-of-the-art models in autonomous driving
Rare Scenario Handling
Demonstration of DriveGPT's capability in dealing with rare and complex driving scenarios
Analysis of its safety and robustness improvements
Conclusion
Future Directions
Discussion on potential advancements and future research in autonomous driving models
Impact and Applications
Overview of the broader impact of DriveGPT on the field of autonomous driving
Potential applications and integration scenarios
Basic info
papers
computer vision and pattern recognition
robotics
machine learning
artificial intelligence
Advanced features
Insights
What are the key contributions of DriveGPT in terms of scaling laws for model parameters, data size, and compute?
How does DriveGPT demonstrate improved safety and robustness in rare scenarios?
How does DriveGPT's generalizability manifest on the Waymo Open Motion Dataset and what does it surpass in terms of performance?
What is DriveGPT and how does it differ from existing models in autonomous driving?