Bimanual Grasp Synthesis for Dexterous Robot Hands
Yanming Shao, Chenxi Xiao·November 24, 2024
Summary
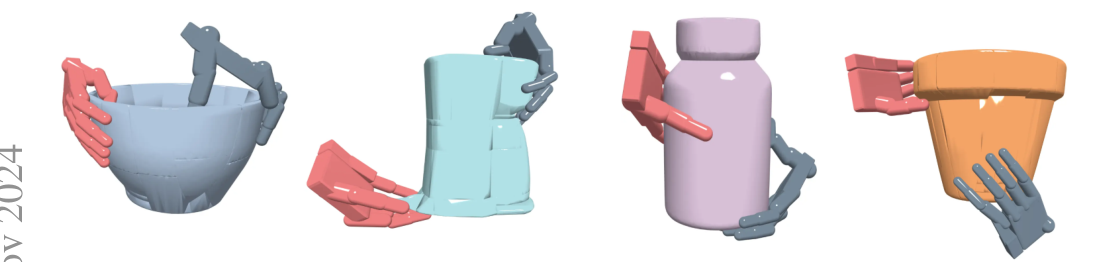
BimanGrasp algorithm optimizes bimanual grasp poses for dexterous robot hands, addressing handling of large, heavy objects. It synthesizes grasp poses through stochastic optimization, verified in Isaac Gym physics simulation. BimanGrasp-Dataset, the first large-scale synthesized bimanual grasp pose dataset, comprises over 150k verified grasps on 900 objects. BimanGrasp-DDPM, a diffusion model trained on this dataset, achieves a 69.87% grasp synthesis success rate, significantly accelerating computational speed compared to the BimanGrasp algorithm.





Introduction
Background
Overview of bimanual grasp poses and their importance in dexterous robot hands
Challenges in handling large, heavy objects with robotic hands
Objective
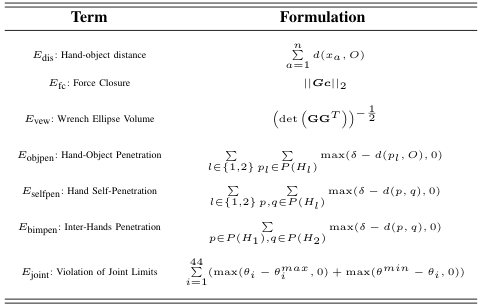
The aim of the BimanGrasp algorithm: optimizing bimanual grasp poses for efficiency and stability
The role of stochastic optimization in synthesizing grasp poses
Method
Data Collection
Description of the Isaac Gym physics simulation environment
Techniques for generating large-scale, realistic bimanual grasp poses
Data Preprocessing
Methods for cleaning, validating, and organizing the synthesized grasp poses
The creation of the BimanGrasp-Dataset, the first large-scale dataset for bimanual grasp poses
BimanGrasp Algorithm
Algorithm Overview
Detailed explanation of the BimanGrasp algorithm's core principles
How it addresses the challenges of grasping large, heavy objects
Optimization Techniques
Description of stochastic optimization methods used in the algorithm
How these methods enhance the efficiency and effectiveness of grasp pose synthesis
BimanGrasp-Dataset
Dataset Characteristics
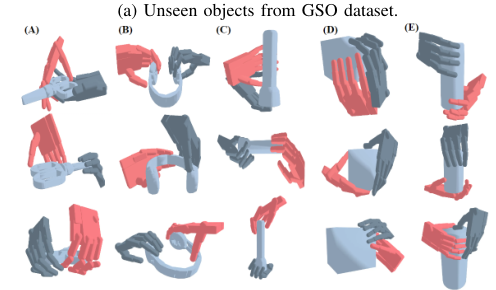
Overview of the BimanGrasp-Dataset, including its size, variety, and object types
Verification process for ensuring the quality and reliability of the dataset
Dataset Utility
The role of the dataset in advancing research and development in bimanual grasping
BimanGrasp-DDPM
Model Description
Introduction to BimanGrasp-DDPM, a diffusion model trained on the BimanGrasp-Dataset
Performance Metrics
Evaluation of BimanGrasp-DDPM's grasp synthesis success rate (69.87%)
Comparison with the original BimanGrasp algorithm in terms of computational speed
Conclusion
Future Directions
Potential areas for further research and development in bimanual grasping
Impact and Applications
The broader implications of the BimanGrasp algorithm and its applications in robotics and automation
Basic info
papers
computer vision and pattern recognition
robotics
artificial intelligence
Advanced features